심층 분석: 로봇이 집안일을 도와주려면 아직 얼마나 멀어야 할까?

 사람들은 어떻게 로봇과 협력할까요? 로봇들끼리는 어떻게 서로 협조할까요?
사람들은 어떻게 로봇과 협력할까요? 로봇들끼리는 어떻게 서로 협조할까요?이 보고서는 Tiger Research에서 작성하였으며, 로봇 기술이 빠르게 발전하고 있으며 전 세계의 주목을 받고 있습니다.
요점 요약
OpenMind는 오픈 소스 런타임 "OM1"을 개발했습니다. OM1은 모든 로봇이 제조사에 관계없이 자유롭게 소통하고 협력할 수 있는 환경을 만듭니다.
OpenMind의 블록체인 네트워크 "FABRIC"은 로봇 인증, 거래 기록 및 분산 검증 시스템을 구축했습니다. FABRIC은 자율 로봇 경제의 기초를 마련합니다.
OpenMind는 ERC-7777 표준을 사용하여 로봇 행동 규칙을 정의합니다. OpenMind는 AIM Intelligence와 협력하여 "물리적 AI 안전 계층"을 개발하고 있습니다. 이러한 기술은 고장을 방지하고 외부 공격을 차단하는 데 함께 작용합니다.
1. 로봇 기술의 성장 속도는 상상을 초월하다
로봇은 더 이상 먼 미래에 속하지 않으며, 소수의 사람만을 위한 것이 아닙니다.
몇 년 전만 해도 로봇은 실험실이나 산업 현장에만 존재했습니다. 지금, 그들은 우리의 일상 생활로 들어오고 있습니다. 사람들이 공원에서 로봇 개를 산책시키거나, 인간형 로봇이 집안일을 돕는 것은 더 이상 공상 과학 영화의 장면이 아닙니다.
출처: 1X Technologies
1X Technologies는 "Neo"라는 가정용 인간형 로봇을 최근 출시하여 이 현실을 더욱 가깝게 만들었습니다. 소비자는 이제 매달 499달러의 구독료를 내거나 한 번에 2만 달러를 지불하여 개인 가정 도우미 로봇을 소유할 수 있습니다. 가격은 여전히 높지만, 의미는 분명합니다: 로봇 기술이 소비자의 가정에 들어왔습니다.

출처: Made Visual Daily
Neo 외에도, 전 세계 기업들은 치열한 경쟁을 통해 혁신을 가속화하고 있습니다. 저명한 참여자로는 미국의 Figure, Tesla, 보스턴 다이나믹스와 중국의 유수기술이 있습니다. 테슬라는 2026년부터 인간형 로봇 "Optimus"의 대량 생산을 계획하고 있으며, 가격은 자동차보다 낮을 것입니다.
로봇 산업은 소비 시장으로 빠르게 확장되고 있습니다. 한때 먼 미래처럼 보였던 것이 예상보다 빨리 다가오며 새로운 일상 현실의 문을 열고 있습니다.
2. 일상 생활 속의 로봇: 가능성과 한계
로봇 기술이 우리의 일상 생활에 어떤 변화를 가져올까요? 로봇과 함께 사는 미래를 상상해 봅시다.
Neo가 집을 청소하고, 유수의 로봇 개가 아이들과 놀고, Optimus가 슈퍼마켓에서 저녁 재료를 사옵니다. 각 로봇은 협력하여 각자의 작업을 처리합니다. 사용자는 더 효율적인 하루를 경험합니다.
한 걸음 더 나아가 생각해 봅시다. 만약 로봇이 협력하여 복잡한 작업을 처리할 수 있다면 어떻게 될까요?
Optimus가 슈퍼마켓에서 쇼핑을 합니다. Neo가 냉장고를 확인하고 Optimus에게 추가 재료를 요청합니다. Figure는 사용자의 알레르기 정보를 바탕으로 레시피를 조정합니다. 각 로봇은 실시간으로 연결되어 팀처럼 유기적으로 작동합니다. 사용자는 간단히 명령합니다: "나는 오믈렛을 먹고 싶어."
하지만 이것은 여전히 먼 꿈입니다. 로봇은 다양한 상황에 유연하게 대응할 수 있는 충분한 지능이 부족합니다. 더 큰 문제는 각 로봇이 서로 다른 기술 스택의 폐쇄 시스템에서 운영되고 있다는 것입니다.
다양한 제조사의 로봇은 데이터를 교환하거나 원활하게 협력하기 어렵습니다. 아이폰 간에는 AirDrop으로 사진을 주고받을 수 있지만, 삼성 Galaxy 폰과는 AirDrop을 할 수 없습니다. 로봇도 동일한 제한에 직면해 있습니다.
Figure의 Helix, 출처: Figure
물론, 제한된 조건에서 협력이 가능할 수 있습니다. 예를 들어 Figure의 Helix: 동일한 제조사, 동일한 기술 스택.
하지만 현실은 더욱 복잡합니다. 현재 로봇 산업을 살펴보면, 다양한 로봇들이 캄브리아 대폭발처럼 시장에 쏟아져 들어오고 있습니다.
미래의 사용자는 자신의 선호와 필요에 따라 다양한 로봇을 선택할 것이며, 단일 브랜드에만 고집하지 않을 것입니다. 오늘날의 가정이 이러한 패턴을 증명합니다. 우리는 삼성 냉장고, LG 세탁기, 다이슨 청소기를 선택합니다.
이제 여러 제조사의 로봇이 같은 집에서 협력하는 모습을 상상해 보십시오. 주방 로봇이 요리를 하고, 청소 로봇이 바닥을 청소합니다. 이 두 로봇은 위치 정보를 공유할 수 없습니다. 비록 데이터를 공유하더라도, 올바르게 해석할 수 없습니다. 그들의 거리 계산 방법과 측정 단위가 다릅니다.
그들은 서로의 이동 경로를 추적할 수 없습니다. 충돌이 발생할 수 있습니다. 이것은 단순한 예일 뿐입니다. 더 많은 로봇과 복잡한 작업이 혼란과 충돌의 위험을 확대할 것입니다.
3. 로봇 협력의 세계 구축
출처: OpenMind
OpenMind는 이러한 문제를 해결하기 위해 등장했습니다.
OpenMind는 폐쇄된 기술 스택을 깨고 모든 로봇이 협력할 수 있는 개방형 생태계를 추구합니다. 이러한 접근 방식은 다양한 제조사의 로봇이 자유롭게 소통하고 협력할 수 있게 합니다.
OpenMind는 이 비전을 실현하기 위해 두 가지 핵심 기반을 제시합니다. 첫째, "OM1"은 로봇을 위한 오픈 소스 런타임입니다. OM1은 모든 로봇이 하드웨어가 다르더라도 서로 이해하고 협력할 수 있도록 표준화된 통신 방법을 제공합니다.
둘째, "FABRIC"은 블록체인 기반의 네트워크로 운영됩니다. FABRIC은 로봇 간의 신뢰할 수 있는 협력 환경을 구축합니다. 이 두 가지 기술은 모든 로봇이 제조사에 관계없이 팀처럼 유기적으로 작동할 수 있는 생태계를 만듭니다.
3.1. OM1: 로봇을 더 스마트하고 유연하게
앞서 보았듯이, 기존의 로봇은 여전히 폐쇄된 시스템에 갇혀 서로 소통하기 어렵습니다.
더 구체적으로 말하자면, 로봇은 이진 데이터나 구조화된 코드 형식을 통해 정보를 교환합니다. 이러한 형식은 제조사에 따라 다르며 호환성을 저해합니다. 예를 들어, A사의 로봇은 위치를 (x, y, z) 좌표로 표시하는 반면, B사는 이를 (위도, 경도, 높이)로 정의합니다. 같은 공간에 있어도 서로의 위치를 이해할 수 없습니다. 각 제조사는 서로 다른 데이터 구조와 형식을 사용합니다.
출처: OpenMind
OpenMind는 "OM1"이라는 오픈 소스 런타임을 통해 이 문제를 해결합니다. 이를 Android와 같다고 생각해 보십시오. 제조사에 관계없이 모든 장치에서 실행될 수 있습니다. OM1도 마찬가지로 모든 로봇이 하드웨어에 관계없이 동일한 언어로 소통할 수 있게 합니다.
OM1은 로봇이 자연어를 기반으로 정보를 이해하고 처리할 수 있게 합니다. OpenMind의 논문 "한 문장으로 충분하다"는 이 점을 잘 설명합니다. 로봇 통신은 복잡한 명령이나 형식을 필요로 하지 않습니다. 자연어의 맥락만으로도 상호 이해와 협력이 가능합니다.
이제 OM1의 작동 방식을 자세히 살펴보겠습니다.
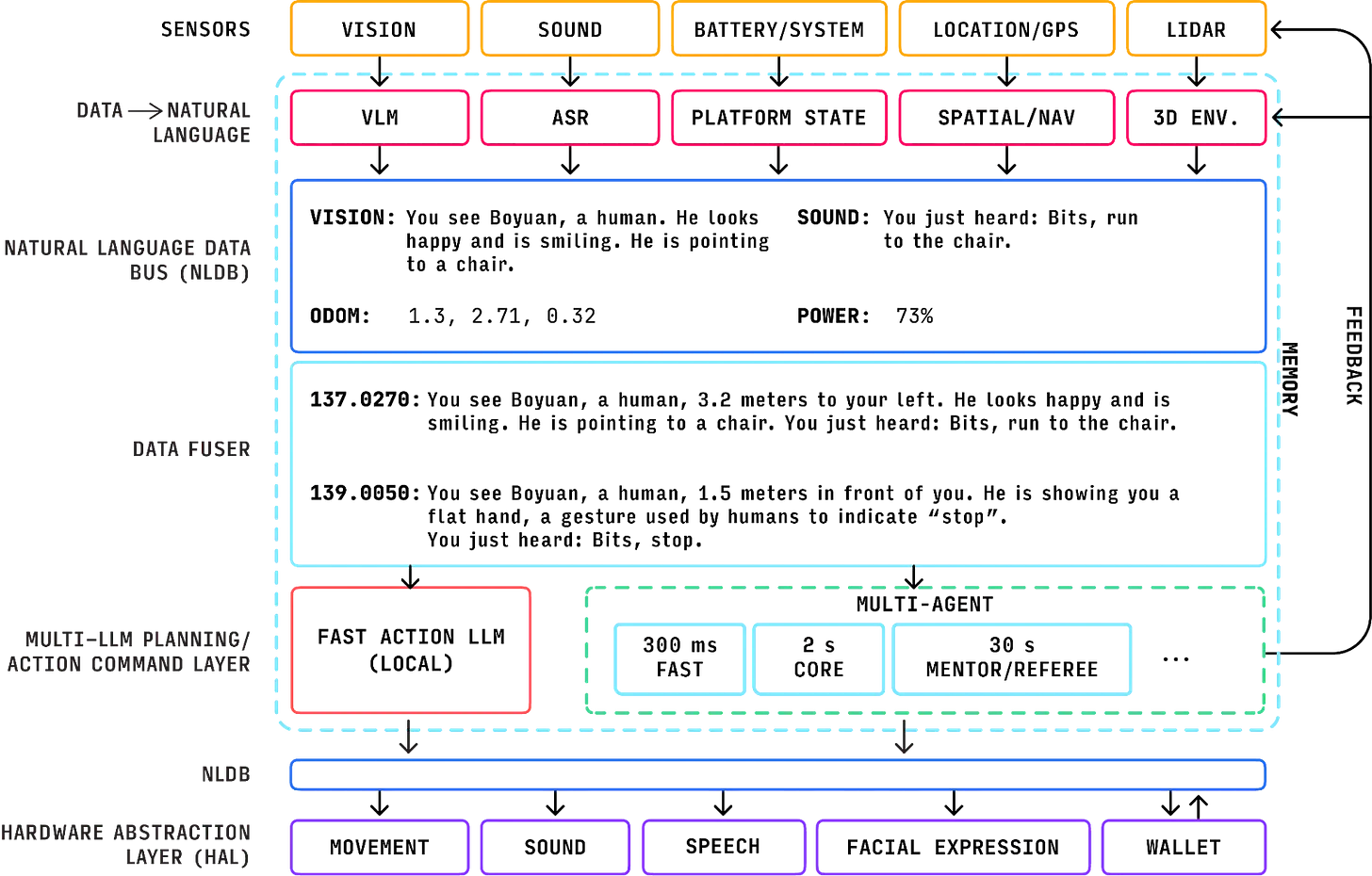
출처: OpenMind
먼저, 로봇은 카메라와 마이크 등의 다양한 센서 모듈을 통해 환경 정보를 수집합니다. 이러한 데이터는 이진 형식으로 입력되지만, 다중 모달 인식 모델이 이를 자연어로 변환합니다. VLM(비주얼 언어 모델)은 시각 정보를 처리하고, ASR(자동 음성 인식)은 오디오를 처리합니다. 이는 "한 남자가 앞의 의자를 가리키고 있다"와 "사용자가 '의자에 가라'고 말했다"와 같은 문장을 생성합니다.
변환된 문장은 자연어 데이터 버스를 통해 집계됩니다. 데이터 융합기는 이 정보를 엮어 상황 보고서를 작성하고 여러 LLM에 전달합니다. LLM은 이 보고서를 통해 상황을 분석하고 로봇의 다음 행동을 결정합니다.
이 방법은 명백한 장점을 가지고 있습니다. 다양한 제조사의 로봇이 원활하게 협력할 수 있습니다. OM1은 하드웨어 위에 자연어 기반의 추상화 계층을 형성합니다. Neo와 Figure는 동일한 자연어 명령을 이해하고 동일한 작업을 수행할 수 있습니다. 각 제조사는 고유의 하드웨어와 시스템을 유지하면서 OM1을 통해 다른 로봇과 자유롭게 협력할 수 있습니다.
제조사 간 협력을 실현하는 것 외에도, OM1은 다른 오픈 소스 모델을 런타임 모듈로 통합하여 경쟁이 아닌 협력을 추구합니다. 로봇이 정밀한 작업이 필요할 때, OM1은 Pi(물리적 지능) 모델을 활용합니다. 다국어 음성 인식이 필요할 때, OM1은 Meta의 전언어 ASR 모델을 사용합니다. OM1은 상황에 따라 모듈을 조합하여 높은 확장성과 유연성을 제공합니다.
OM1의 장점은 여기서 그치지 않습니다. OM1은 근본적으로 LLM을 활용합니다. 로봇은 단순한 명령을 수행하는 것에 그치지 않습니다. 그들은 상황적 맥락을 이해하고 자율적으로 결정을 내릴 수 있습니다.

무언가를 집어 드는 시연(이해를 돕기 위해 Figure의 자료를 사용), 출처: Figure
구체적인 예를 살펴보겠습니다. 로봇 앞에 여러 개의 물체가 놓여 있습니다. 누군가 "사막과 관련된 물체를 집어라"고 요청합니다. 전통적인 로봇은 "사막 물체"가 미리 정의된 규칙에 없기 때문에 실패할 것입니다. OM1은 다릅니다. 그것은 LLM을 통해 개념 관계를 이해합니다. "사막"과 "선인장" 사이의 연관성을 독립적으로 추론합니다. 그것은 선인장 인형을 선택합니다. OM1은 로봇 협력의 기초를 마련하고 개별 로봇을 더욱 스마트하게 만듭니다.
3.2. FABRIC: 분산 로봇을 하나로 연결하는 네트워크
OM1은 로봇을 더 스마트하게 만들고, 그들 간의 원활한 소통을 가능하게 합니다. 하지만 소통 외에도 또 다른 도전이 있습니다. 서로 다른 로봇이 협력할 때, 그들은 어떻게 서로를 신뢰할 수 있을까요? 시스템은 누가 어떤 작업을 수행했는지, 그리고 그것이 올바르게 완료되었는지를 검증해야 합니다.
인간 사회는 법률을 통해 행동을 규범화하고, 계약을 통해 이행을 보장합니다. 이러한 메커니즘은 사람들이 낯선 사람과 안전하게 거래하고 협력할 수 있게 합니다. 로봇 생태계도 동일한 메커니즘이 필요합니다.
출처: OpenMind
OpenMind는 "FABRIC"이라는 블록체인 기반의 네트워크를 통해 이 문제를 해결합니다. FABRIC은 로봇을 연결하고 그들의 협력을 조정합니다.
FABRIC의 핵심 구조를 살펴보겠습니다. FABRIC은 먼저 각 로봇에 "신원"을 할당합니다. FABRIC 네트워크의 각 로봇은 ERC-7777(인간 로봇 사회 거버넌스)에 기반한 고유한 신원을 부여받습니다.
신원이 할당된 로봇은 실시간으로 네트워크와 위치, 작업 상태 및 환경 정보를 공유합니다. 그들은 동시에 다른 로봇으로부터 상태 업데이트를 받습니다. 마치 게임에서의 상황판이나 미니맵처럼, 모든 로봇은 공유된 지도를 통해 서로의 위치와 상태를 실시간으로 추적합니다.
단순히 정보를 공유하는 것만으로는 충분하지 않습니다. 로봇이 잘못된 정보를 제출할 수 있습니다. 센서 오류가 발생하여 데이터를 왜곡할 수 있습니다. FABRIC은 블록체인의 합의 메커니즘을 활용하여 데이터의 신뢰성을 보장합니다.
실제 시나리오를 고려해 보겠습니다. 배달 로봇 A가 창고 로봇 B와 협력하여 화물을 운송합니다. 로봇 B는 자신이 2층에 있다고 보고합니다. 근처의 센서 로봇과 엘리베이터 로봇이 B의 위치를 교차 검증합니다. 여러 노드가 블록체인에서 거래를 검증합니다. 여러 로봇이 같은 방식으로 작동합니다. 그들은 B의 실제 위치를 확인하고 합의에 도달합니다. 만약 로봇 B가 센서 오류로 인해 2층에 있다고 보고했지만 실제로는 3층에 있다면, 검증 과정에서 차이를 감지할 수 있습니다. 네트워크는 수정된 정보를 기록합니다. 로봇 A는 3층의 올바른 위치로 이동합니다.
FABRIC의 역할은 검증에 그치지 않습니다. FABRIC은 다가오는 로봇 경제를 위한 추가 기능을 제공합니다. 첫 번째는 개인정보 보호입니다. 블록체인의 투명성은 신뢰를 보장하지만, 실제 로봇 생태계를 운영하는 데 있어 개인정보 보호도 중요합니다. FABRIC은 분산 구조를 채택하여 작업이나 위치에 따라 서브 네트워크를 나누고, 이를 네트워크 중앙 서버를 통해 연결합니다. 이러한 구조는 민감한 정보를 보호합니다. 이 솔루션은 완벽하지 않지만, 지속적인 연구가 개인정보 보호를 강화할 것입니다.
FABRIC은 또한 로봇 정산 프로토콜(MSP)을 제공합니다. MSP는 호스팅, 검증 및 정산을 자동화합니다. 시스템이 작업 완료를 검증하면, 자동으로 스테이블 코인으로 결제하고 모든 증거를 블록체인에 기록합니다. 로봇은 단순히 신뢰를 구축하는 협력체가 아니라, 자율 거래의 경제 주체가 될 것입니다.
4. 만약: OpenMind를 통해 바라본 미래의 일상 생활
4.1. 새로운 세계: 로봇과의 유토피아
우리는 오랫동안 "로봇 경제"를 꿈꿔왔습니다. 로봇이 경제 활동에 직접 참여하는 것입니다. 로봇은 독립적으로 판단하고, 상품을 주문하며, 다른 로봇과 협력하고 가치를 교환합니다. OpenMind는 이제 이 꿈을 현실로 만들고 있습니다.
출처: OpenMind
어떤 일상 생활이 펼쳐질까요? OpenMind의 데모 비디오를 시청해 보십시오. 당신은 로봇에게 "점심을 사다 줘"라고 말합니다. 로봇은 가게로 이동하여 주문을 확인하고, 암호화폐로 직접 결제한 후 음식을 가져옵니다. 겉보기에는 간단해 보이지만, 의미는 큽니다. 로봇은 더 이상 미리 정의된 환경에서 명령을 수행하는 것에 그치지 않습니다. 그들은 독립적으로 판단하고 행동하는 경제 주체로 변모합니다.
상상력은 더 확장될 수 있습니다. 인간과 로봇 간의 거래 외에도, 로봇 간의 거래도 발생할 것입니다. 예를 들어, 가정용 인간형 로봇이 집안일을 하다가 필수품이 떨어졌습니다. 그것은 근처의 슈퍼마켓 로봇에게 독립적으로 제품을 주문합니다. 이 과정에서 자동으로 스마트 계약이 생성됩니다. 슈퍼마켓 로봇이 제품을 배달합니다. 가정용 로봇은 상품을 확인하고 스테이블 코인으로 결제를 완료합니다.
이전에는 존재하지 않았던 새로운 가치 교환 형태가 등장할 것입니다. 배달 로봇은 목적지에 도달하기 위한 최적의 경로를 계산합니다. 그것은 교통 로봇에게 실시간 데이터를 요청하고 소액의 비용을 지불합니다. 일상적인 작은 협력조차 거래가 됩니다.
4.2. 위험한 세계: 로봇과의 반유토피아
로봇은 더 이상 공상 과학 영화의 주제가 아닙니다. 중국에서는 소비자들이 약 1,000달러에 로봇 개(유수 Go2)를 구매하고, 약 12,000달러에 인간형 로봇(Engine AI PM01)을 구매합니다. 대규모 채택이 빠르게 가속화되고 있습니다.
출처: WhistlinDiesel
일상 생활에서 로봇의 수가 증가하는 것은 가장 중요한 문제가 아닙니다. 로봇의 판단 능력은 여전히 제한적입니다. 안전성이 보장되지 않습니다. 만약 로봇이 상황을 잘못 판단하고 위험한 결정을 내린다면, 이는 사람에게 직접적인 해를 끼칠 수 있습니다. 이러한 해는 단순한 사고가 아니라 재앙이 될 수 있습니다.
OpenMind는 이 문제에 정면으로 대응하고 있습니다. 그것은 ERC-7777 표준을 통해 각 로봇에 고유한 신원을 할당하고 이를 방어막으로 사용합니다. 예를 들어, 한 로봇 개는 "인간의 친구이자 보호자"라는 신원을 부여받습니다. 이 신원은 로봇이 사람을 공격하거나 해치는 것을 방지합니다. 로봇은 항상 친근하고 안전한 방식으로 행동합니다. 로봇은 지속적으로 자신의 신원과 역할을 확인하고 부적절한 행동을 차단합니다.
OpenMind는 더 나아갑니다. 그들은 AIM Intelligence와 협력하여 "물리적 AI 안전 계층"을 개발하고 있습니다. 이 계층은 로봇의 환각을 차단하고 외부 침입 및 공격을 방어합니다. 예를 들어, 로봇이 날카로운 물체를 들고 이동하려고 할 때, 근처에 아이가 서 있다면 시스템은 이를 "부상 위험"으로 인식하고 즉시 작업을 중단합니다.
5. OpenMind: 내일의 로봇 사회 구축
OpenMind는 연구 단계를 넘어섰습니다. 로봇 산업의 실질적인 변화를 추진할 준비가 되어 있습니다.
창립자 Jan Liphardt는 전 스탠포드 대학교 생물물리학 교수로, 핵심 위치에 있습니다. 그는 복잡한 시스템 간의 조정 및 협력 메커니즘을 연구했습니다. 그는 이제 로봇의 자율 판단 및 협력 구조를 설계하고 있습니다. 그는 전체 기술 개발을 이끌고 있습니다.
출처: OpenMind
이러한 기술 리더십은 Pantera Capital이 주도한 2천만 달러의 자금을 유치했습니다. OpenMind는 기술 개발 및 생태계 확장을 위한 재정적 기반을 마련했습니다. 이는 비전을 실현할 수 있는 실행 능력을 보장합니다.
시장 반응은 긍정적입니다. 유수, 심도 로봇(DEEP Robotics), 월경(Dobot), 유비쿼터스(UBTECH)와 같은 주요 하드웨어 회사들이 OM1을 핵심 기술 스택으로 채택하고 있습니다. 협력 네트워크는 빠르게 확장되고 있습니다.
하지만 도전은 여전히 존재합니다. FABRIC 네트워크는 아직 준비 단계에 있습니다. 디지털 환경과 달리 물리적 세계는 더 많은 변수를 나타냅니다. 로봇은 통제된 실험실이 아닌 예측할 수 없는 실제 세계 환경에서 작동해야 합니다. 복잡성이 크게 증가합니다.
그럼에도 불구하고, 로봇 협력과 안전은 장기적인 해결책이 필요합니다. 우리는 OpenMind가 이 도전에 어떻게 대응하는지, 그리고 로봇 생태계에서 어떤 역할을 하는지 주목해야 합니다.
 위험 경고 위험 경고
위험 경고 위험 경고